Point to Point Joint
The Point-to-Point Joint limits the translation so that pivot points between the two rigid bodies match in world space. You can use the Point to Point joint to create effects, such as a chain-link, or to pin objects together.
FixedJoint3D
In Evergine, a Point-to-Point Joint is implemented using the PointToPointJoint3D component.
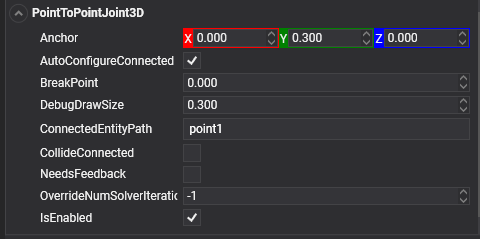
Properties
| Property | Default | Description |
|---|---|---|
| ConnectedEntityPath | null | The entity path of the connected body. Only when the path is valid a Joint is established properly. |
| Anchor | 0, 0, 0 | The point which defines the center of the joint in source entity local space. All physics-based simulations use this point as the center in calculations. |
| AutoConfigureConnected | true | Enable this setting to automatically calculate the ConnectedAnchor position to match the global position of the anchor property. This is the default setting. Disable it to configure the position of the connected anchor manually. |
| ConnectedAnchor | auto-calculated | Manually configure the connected anchor position, in the connected body local space. |
| BreakPoint | 0 | If the value is greater than 0, Indicates the force that needs to be applied for this joint to break. |
| CollideConnected | false | Determines whether a collision between the two bodies managed by the joint is enabled. |
Using Point-to-Point Joint
This snippet creates two bodies and add a fixed joint maintaining the relative position at start. This is because the AutoConfigureConnected property is set to true.
protected override void CreateScene()
{
// Load your material
var cubeMaterial = this.Managers.AssetSceneManager.Load<Material>(EvergineContent.CrateMat);
int chainLength = 6;
Entity previousLink = null;
// Create the chain...
for (int i = 0; i < chainLength; i++)
{
/// The first object is kinematic (we don't want a falling chain :D)
var rigidObjectType = (i == 0) ? RigidBodyType3D.Kinematic : RigidBodyType3D.Dynamic;
// Create the link entities...
var link = this.CreateCube(cubeMaterial, new Vector3(i, 0, 0), 0.75f, rigidObjectType);
if (previousLink != null)
{
// Add a PointToPoint joint to the previous link connected to the current link...
previousLink.AddComponent(new PointToPointJoint3D()
{
ConnectedEntityPath = link.EntityPath,
});
}
previousLink = link;
this.Managers.EntityManager.Add(link);
}
}
private Entity CreateCube(Material material, Vector3 position, float size, RigidBodyType3D rigidBodyType)
{
Entity cube = new Entity()
.AddComponent(new Transform3D()
{
Position = position
})
.AddComponent(new MaterialComponent() { Material = material })
.AddComponent(new CubeMesh() { Size = size })
.AddComponent(new MeshRenderer())
.AddComponent(new RigidBody3D() // Add a RigidBody3D component...
{
PhysicBodyType = rigidBodyType
})
.AddComponent(new BoxCollider3D()); // Add a BoxCollider3D to the physic body...
return cube;
}