Cone Twist Joint
For ragdolls, the Cone-Twist Joint is useful for limbs like the upper arm. It is a special point-to-point joint that adds cone and twist axis limits.
A Cone-Twist Joint is similar to a Point-to-Point Joint relationship but specifies an elliptical cone within which rotation may take place. The cone is described by specifying a maximum rotation on each axis.
ConeTwistJoint3D
In Evergine, a Cone-Twist Joint is implemented using the ConeTwistJoint3D component.
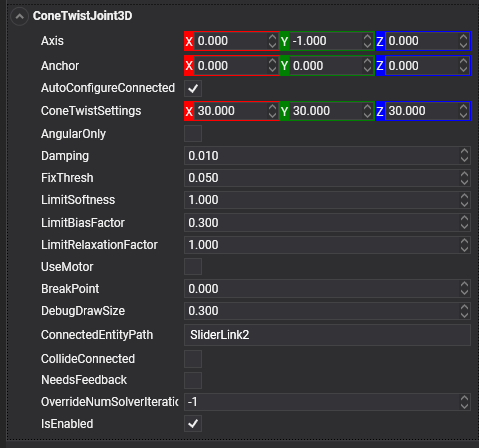
Properties
Common Properties
| Property | Default | Description |
|---|---|---|
| ConnectedEntityPath | null | The entity path of the connected body. Only when the path is valid is a joint properly established. |
| Anchor | 0, 0, 0 | The point which defines the center of the joint in source entity local space. All physics-based simulations use this point as the center in calculations. |
| AutoConfigureConnected | true | Enable this setting to automatically calculate the ConnectedAnchor position to match the global position of the anchor property. This is the default setting. Disable it to configure the position of the connected anchor manually. |
| ConnectedAnchor | auto-calculated | Manually configure the connected anchor position in the connected body local space. |
| BreakPoint | 0 | If the value is greater than 0, it indicates the force that needs to be applied for this joint to break. |
| CollideConnected | false | Determines whether a collision between the two bodies managed by the joint is enabled. |
Limit Properties
| Property | Default | Description |
|---|---|---|
| ConeTwistSettings | 30º, 30º, 30º | Defines the limitation angle on each axis. |
| LimitSoftness | 0.9 | Once an angle is greater than softness * the maximum angle, the constraint begins to take effect. Lowering the value of softness softens the constraint boundaries. |
| LimitBiasFactor | 0.3 | The rate at which the constraint corrects errors in orientation. A value of 1 will ensure that the constraint is always obeyed. It is recommended to keep bias between 0.2 and 0.5. |
| LimitRelaxationFactor | 1 | The rate at which the angular velocity is changed by the constraint. A low value means the constraint will modify the velocities slowly, leaving the boundaries appearing softer. |
Motor Properties
The following properties set the motor properties of the joint.
| Property | Default | Description |
|---|---|---|
| UseMotor | false | If enabled, the motor makes the object spin around. |
| MotorTargetRotation | 0, 0, 0 | The target angular speed on each axis. |
| MotorTargetImpulse | 0 | The impulse applied to attain the speed. |
Using Cone-Twist Joint
This snippet creates a series of bodies attached using Cone-Twist joints.
protected override void CreateScene()
{
this.Managers.RenderManager.DebugLines = true;
// Load your material
var cubeMaterial = this.Managers.AssetSceneManager.Load<Material>(EvergineContent.CrateMat);
int chainLength = 4;
Entity previousLink = null;
// Create the chain...
for (int i = 0; i < chainLength; i++)
{
// The first object is kinematic (we don't want a falling chain :D)
var rigidObjectType = (i == 0) ? RigidBodyType3D.Kinematic : RigidBodyType3D.Dynamic;
// Create the link entities...
var link = this.CreateCube(cubeMaterial, new Vector3(i, 0, 0), 0.75f, rigidObjectType);
if (previousLink != null)
{
// Limit Joint to 40º or 10º...
var angle = MathHelper.ToRadians(i % 2 == 0 ? 40 : 10);
// Add a PointToPoint joint to the previous link connected to the current link...
previousLink.AddComponent(new ConeTwistJoint3D()
{
ConnectedEntityPath = link.EntityPath,
Anchor = new Vector3(0.5f, 0, 0), // Sets the anchor between the two objects
ConeTwistSettings = Vector3.One * angle, // Sets the limit angle...
});
}
previousLink = link;
this.Managers.EntityManager.Add(link);
}
}
private Entity CreateCube(Material material, Vector3 position, float size, RigidBodyType3D rigidBodyType)
{
Entity cube = new Entity()
.AddComponent(new Transform3D()
{
Position = position
})
.AddComponent(new MaterialComponent() { Material = material })
.AddComponent(new CubeMesh() { Size = size })
.AddComponent(new MeshRenderer())
.AddComponent(new RigidBody3D() // Add a RigidBody3D component...
{
PhysicBodyType = rigidBodyType,
})
.AddComponent(new BoxCollider3D()); // Add a BoxCollider3D to the physic body...
return cube;
}